ExcelsiusGPS®
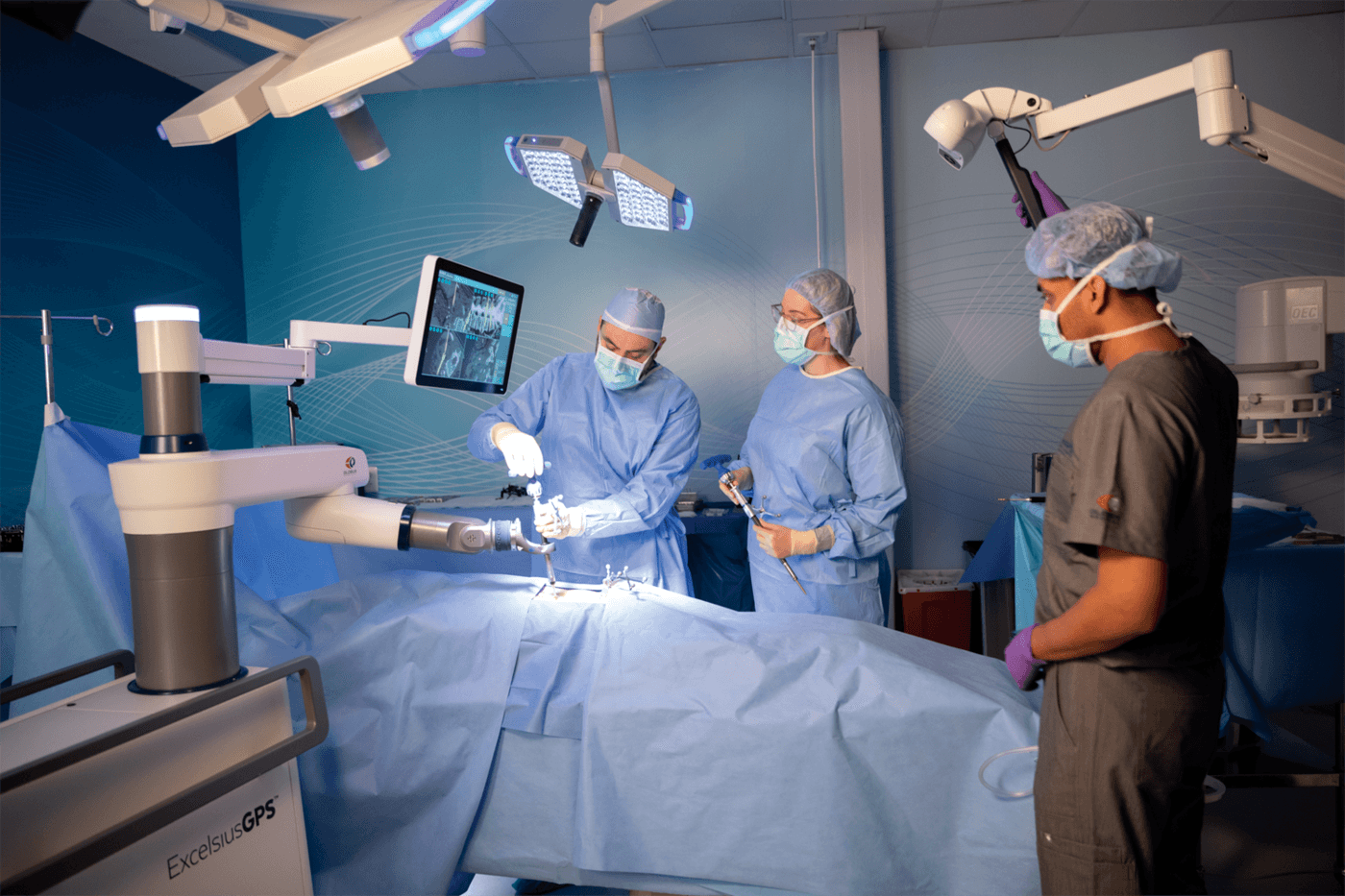
La primera y única plataforma de navegación activa robótica del mercado que ofrece un abordaje comprehensivo de los procedimientos mínimamente invasivos de columna vertebral y craneales, desde la planificación hasta la ejecución.
El sistema permite una alineación de máxima precisión del brazo robótico y de la trayectoria exacta con navegación integrada para colocar tornillos pediculares – software (SW.) de cirugía de raquis, SW. de implantación de cajas intersomáticas y SW. para cirugía craneal.
1
2
3

1
Multifuncional
- Navegación + Robótica
- Columna
- Cráneo
2
Único con información en tiempo real
- End Effector
- (nav+robot activo)
- Surgeon bracelete
- (fuerza/deflexión)
- Seguridad DRB
3
Versatilidad y compatibilidad de imágenes 3D/2D
- PreOp TAC 3D
- IntraOp TAC 3D
- IntraOp Fluoro 2D
Navegación + Robótica
La tecnología Terminal Activo End Effector y adaptable combina de forma optimizada navegación+robótica.

Columna vertebral
ExcelsiusGPS® el modulo de cajas intersomáticas amplía las capacidades del sistema para navegar robóticamente por los implantes tanto de tornillos pediculares como las cajas intersomáticas expansibles más avanzada del mercado.

Cráneo
ExcelsiusGPS® está ayudando a cirujanos y hospitales a brindar las mejores opciones de tratamiento posibles para sus pacientes. Esta plataforma multifuncional ha ampliado sus aplicaciones para incluir navegación robótica para procedimientos estereotácticos craneales (Biopsias navegadas, Cirugía de Parkinson y cirugía de Epilepsia).

El sistema proporciona información en tiempo real sobre la posición del brazo a través de su terminal activo End Effector con respecto a la anatomía del paciente, un sensor integrado en el brazo de deflexión mejorando la seguridad. La forma única que se mantiene la integridad de la navegación – utilizando un sistema de referencia dinámico del paciente (DRB) y otro que monitoriza a tiempo real el DRB contribuye a reducir de forma significativa la cantidad de radiación requerida durante la intervención. Estas funcionalidades únicas, ayudan a cerrar el bucle del guiado robótico, ofreciendo al cirujano más datos intraoperatorios, permitiendo a su vez tomar decisiones informadas.

ExcelsiusGPS™ es compatible con sistemas de obtención de imágenes de TC preoperatoria, TC intraoperatoria y fluoroscopia. Esta versatilidad permite integrar el sistema en cualquier flujo de trabajo quirúrgico y habilita la planificación y la navegación en 2D o 3D.

Procedimientos innovadores
A nivel clínico , la incorporación de este sistema robótico en las cirugías de raquis (C1 – S2), y de procedimientos estereotácticos de cráneo, permitirá establecer un cambio de paradigma en la planificación y ejecución de la cirugía mínimamente invasiva (MIS) robótica de forma optimizada en la misma plataforma, permitiendo mejorar la satisfacción del paciente producidos por los mejores resultados clínicos y una recuperación más rápida.

En paralelo este proyecto impactará positivamente en la optimización y eficiencia de los recursos, lo que posibilita un aumento de la capacidad operativa del hospital (métricas de gestión hospitalaria):
-
Reducción de Tiempo quirúrgico MIS
-
Reducción de exposición de radiación MIS
-
Reducción Estancia Hospitalaria
-
Reducción de tasa de Reintervenciones
El impacto Clínico
A nivel clínico , la incorporación de este sistema robótico en las cirugías de raquis (C1 – S2), y de procedimientos estereotácticos de cráneo, permitirá establecer un cambio de paradigma en la planificación y ejecución de la cirugía mínimamente invasiva (MIS) robótica de forma optimizada en la misma plataforma, permitiendo mejorar la satisfacción del paciente producidos por los mejores resultados clínicos y una recuperación más rápida.

Reduce el tiempo operativo
Reduce la exposición a la radiación
Mejora la Exactitud
Comparado con técnicas quirúrgicas convencionales – 2.
2. Vaccaro, A. R. et al. ExcelsiusGPS® Robotic Navigation Platform Improves Screw Accuracy and Reduces Radiation Exposure Compared to Conventional Fluoroscopic Techniques in a Simulated Surgical Model. White paper (GMWP51). Globus Medical, Inc. (April 2018).
Ejecución Robótica de toda la columna vertebral

Módulo de cajas intersomáticas
Instrumental integrado

Funcionalidad intuitiva del cirujano

Brazo Robótico rígido

ExcelsiusGPS® Interbody Solutions
Single Position Lateral Surgery
Caracteristicas
Software/Hardware Módulo de Cráneo
INCREMENTO
AUTOMATIZACIÓN
Elimina el arco estereotáctico a través de la planificación integrada, la navegación y la alineación de la trayectoria para la integridad del procedimiento.
DISEÑADO para un
ESPECTRO MÁS AMPLIO
Desde biopsias comunes hasta procedimientos complejos de DBS, adáptese a cada flujo de trabajo preferido, en una plataforma optimizada.
EXACTITUD
SIN SACRIFICIO
Registro basado en fluoroscopia, diseñado para la precisión de navegación, baja exposición a la radiación y tiempo de procedimiento rápido.
The Next Evolution of

DEMO ExcelsiusGPS® Modelo 3D
Últimas noticias relacionadas

Navegación asistida por robot para neurocirugía estereotáctica: evaluación de alta precisión
La neurocirugía estereotáctica ha sido un pilar fundamental en la planificación y ejecución de procedimientos mínimamente invasivos dentro del cráneo, permitiendo la localización precisa de estructuras cerebrales profundas. Tradicionalmente, este enfoque ha dependido del uso de marcos estereotácticos, los cuales requieren cálculos manuales de coordenadas y ajustes físicos del marco, lo que introduce una fuente […]
Uso de un brazo robótico para la fijación de fracturas pélvicas.
Las fracturas pélvicas inestables representan un gran desafío quirúrgico debido a la complejidad anatómica y a la proximidad de estructuras neurovasculares críticas. La colocación de tornillos sacro-iliacos es una técnica ampliamente utilizada para la estabilización de estas lesiones, pero su precisión depende en gran medida de la orientación fluoroscópica y de la experiencia del cirujano, […]

El servicio de Neurocirugía del H. La Paz se convierte en el primero de España en disponer del brazo robótico Excelsius GPS de PRIM
Esta nueva dotación convierte así al Servicio de Neurocirugía del Hospital La Paz de Madrid, en el primero del país, tanto público como privado, que cuenta con la tecnología de vanguardia Excelsius GPS para intervenciones de columna vertebral, con el que ha realizado hasta la fecha 37 intervenciones y ha implantado 220 tornillos en pacientes. “Esta tecnología […]
¿Necesitas más información sobre Robótica?.
Te escuchamos
¿Necesitas más información sobre los productos de PRIM Neurotrauma?
Si tienes alguna pregunta sobre nuestras soluciones, contacta con nosotros.
Estamos aquí
Sede Central
Calle Yolanda González, 15,
28938 Móstoles, Madrid, España
_
neurotrauma@prim.es
Tel: +34 91 334 24 12
Calle Yolanda González, 15,
28938 Móstoles, Madrid, España
_
neurotrauma@prim.es
Tel: +34 91 334 24 12